Оптимальная конструкция камеры для зум-объектива
- доля
- Время выпуска
- 2021/11/12
Резюме
Оптимизация зум-камеры является ключом к реализации цели оптического дизайна и, наконец, к реализации зум-объектива. В этой статье конкретно обсуждается конструкция оптимизации кулачка зум-объектива.
Быстрое развитие оптической конструкции и технологии производства, технологии производства точного оборудования, технологии производства ПЗС-матриц и электронных технологий в сочетании с изменчивостью поля зрения (фокусного расстояния) зум-объектива делает зум-объектив все более широко используемым. .
В настоящее время зум-объектив обычно имеет механическую компенсационную оптическую структуру, а количество переменных компонентов обычно составляет две или более группы. Оптическая конструкция вариообъектива и конструкция механизма перемещения зум-объектива сложны.
Оптимизация зум-камеры является ключом к реализации цели оптического дизайна и, наконец, к реализации зум-объектива. При разработке военного зум-объектива также необходимо учитывать плавность движения зума и скорость процесса зума. В этой статье в основном обсуждается метод оптимизации кулачка вариообъектива с двумя переменными элементами и механической компенсацией.
Основные технические требования
В соответствии с фактическими требованиями применения основные конструктивные показатели зум-объектива следующие:
(1) Масса: m<1500 г;
(2) Фокусное расстояние составляет 24~120 рамок, общее время масштабирования составляет 6 с ± 1 с;
(3) Максимальное эквивалентное относительное отверстие составляет 1:4,0;
(4) Оптическая передаточная функция:
0 Поле зрения: MTF≥0,6(21 пл/мм)
Поле зрения 0,71: MTF≥0,5 (15 лин/мм);
(5) Смещение плоскости изображения при масштабировании не более ±0,1 мм;
(6) Смещение оптической оси при масштабировании не превышает ±0,12 мм.
Оптимизация камеры с зумом
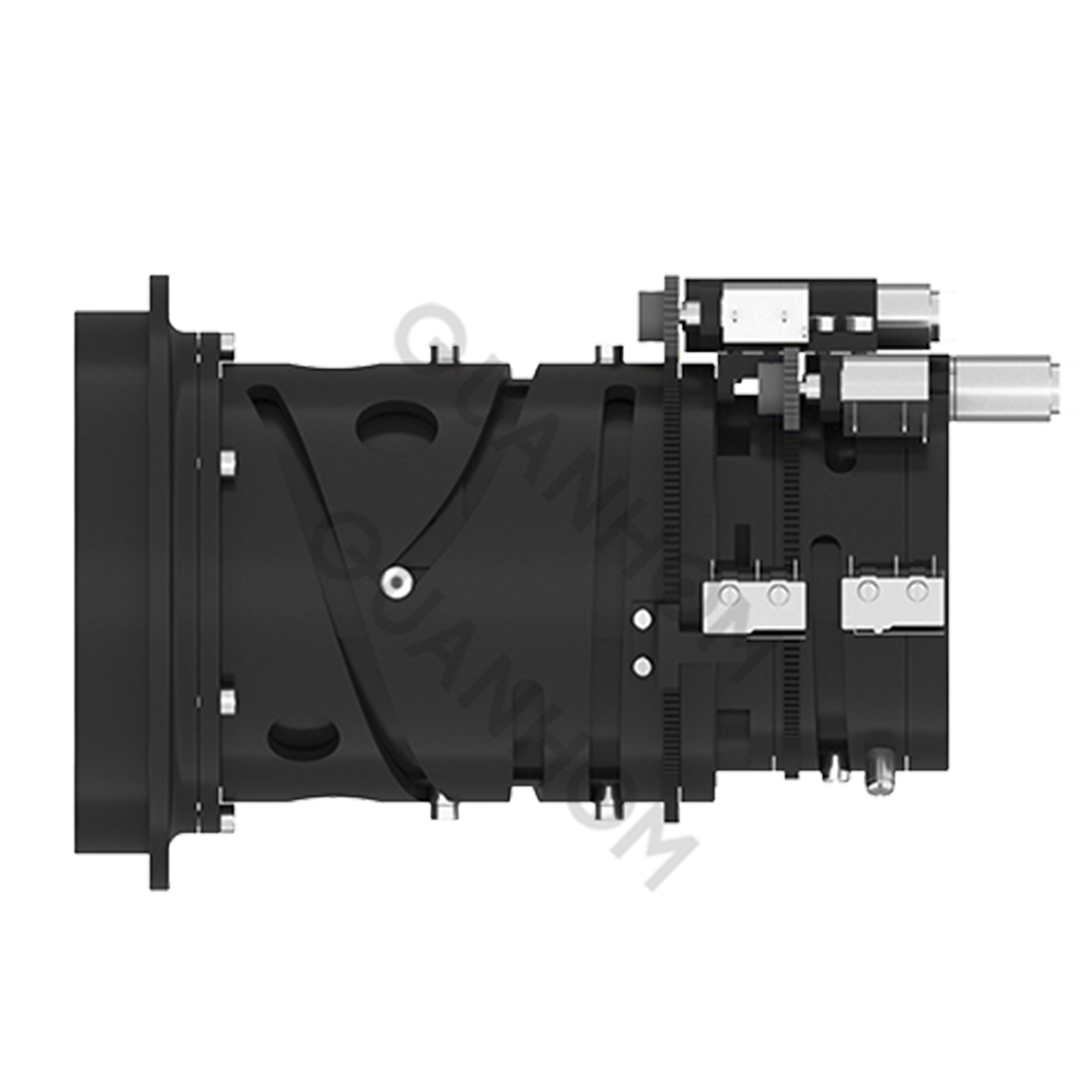
На рисунке 1 показана оптическая структура зум-объектива. Объектив использует схему механической компенсации с двумя переменными компонентами: переменное увеличение отрицательной группы и компенсация положительной группы.
Группа масштабирования одинарной двойной структуры и группа компенсации одинарной структуры имеют взаимно однозначное соответствие между положениями перемещения и должны управляться сложным кулачковым механизмом. Теоретически плоскости изображения всех фокусных расстояний могут быть одинаковыми.
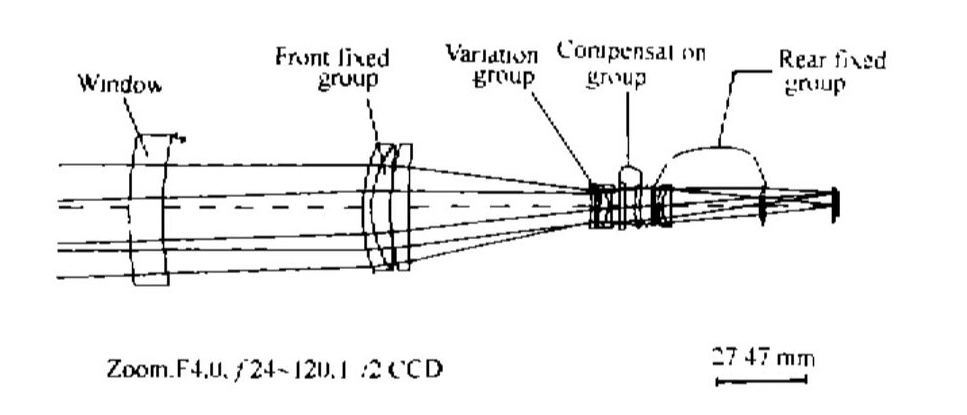
Рисунок 1. Оптическая форма зум-объектива.
После того, как оптические параметры зум-объектива оптимизированы и определены оптической схемой, необходимо рассчитать ряд точек данных кулачка, соответствующих друг другу. Расчет данных кулачков является предпосылкой для точной обработки механических кулачков. Объем данных должен определяться опытным путем.
Чтобы обеспечить точность кулачка, а также плавность и быстроту движения трансфокатора, длина шага кулачковой линии должна составлять от 002 до 0,05 мм. В то же время угол подъема двух наборов кривых кулачков должен быть как можно меньшим и сбалансированным.
Существует много способов расчета кулачка, но для программного обеспечения оптического проектирования CODE V требуется программирование на макроязыке Macro-PIUS. Ниже приведена часть макропрограммы, скомпилированной в процессе оптимизации кулачка. С помощью этой программы программное обеспечение для оптического проектирования CODE V можно использовать для оптимизации кулачка объектива с двумя переменными элементами непрерывного масштабирования.
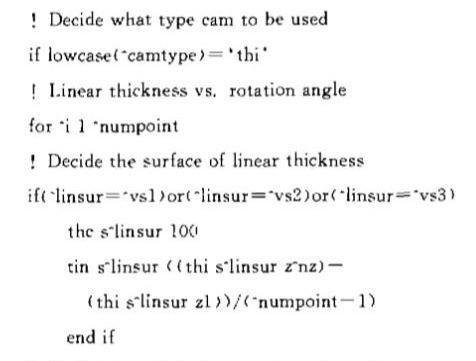
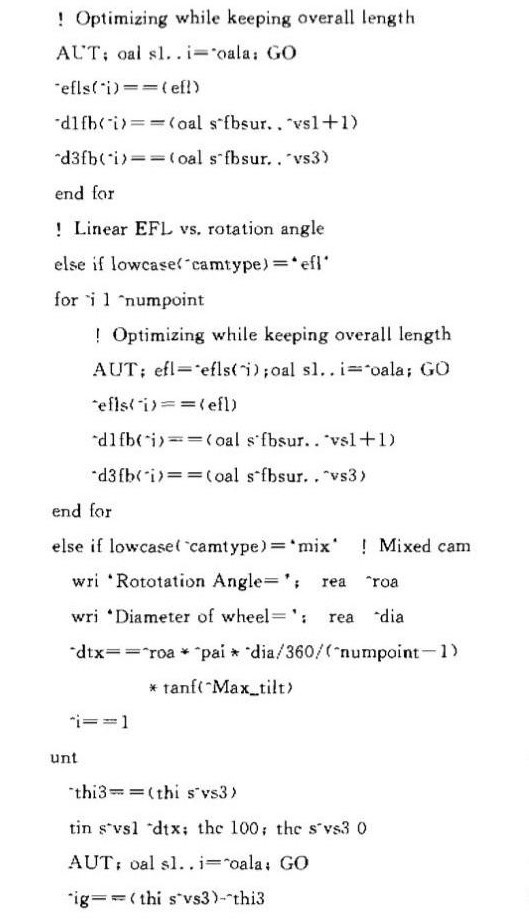
В основной части программы три типа камер оптимизируются и сравниваются с разработанным объективом с постоянным зумом.
(1) Угол обзора имеет линейную зависимость от фокусного расстояния.
На рисунке 2 представлена схематическая диаграмма результата оптимизации кривой кулачка до линейной зависимости между углом поворота кулачка и изменением фокусного расстояния. Разработанный кулачок имеет небольшой угол подъема на среднем и длинном фокусных расстояниях, но местный угол подъема в пределах 15 мм на коротком конце фокусного расстояния велик, до 67°, кулачок затруднен в управлении и крутящий момент несбалансирован, поэтому этот метод оптимизации невозможен.
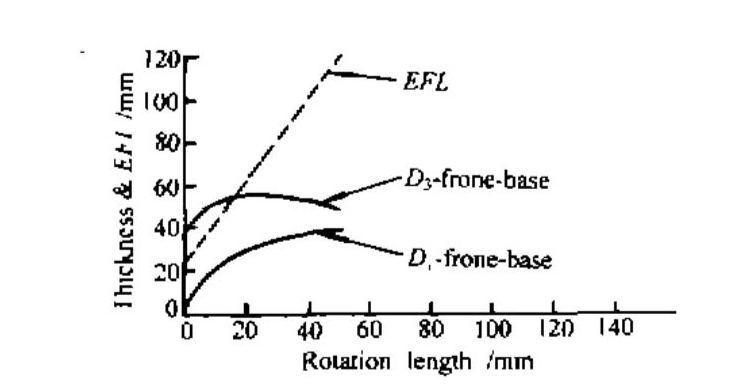
Рисунок 2. Угол поворота кулачка линейный с EFL.
(2) Угол кулачка имеет линейную зависимость от переменного интервала
На рис. 3 представлена схематическая диаграмма результата оптимизации кривой кулачка до линейной зависимости между углом поворота кулачка и переменным воздушным интервалом. Разработанный кулачок имеет приемлемые углы подъема на среднем и коротком фокусных расстояниях, но локальный угол подъема в диапазоне 20 мм на длинном фокусном расстоянии больше, до 56°, что не способствует приводу кулачка и динамическому балансу крутящего момента. Этот метод не рекомендуется.
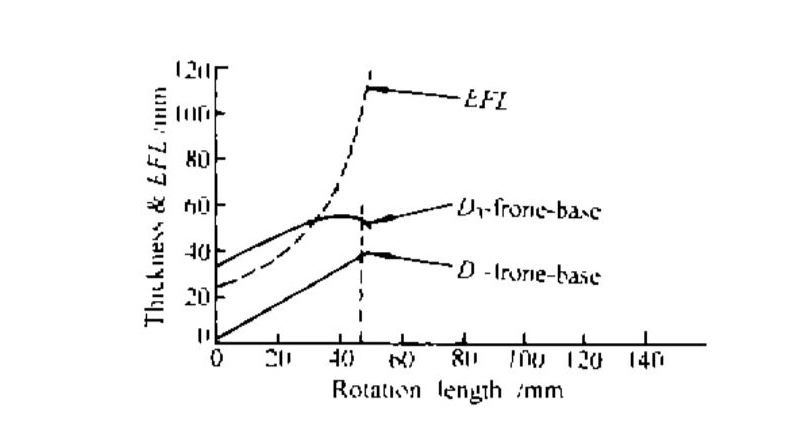
Рис. 3. Угол поворота кулачка линейный с переменной толщиной.
(3) Гибридная оптимизированная камера с зумом
Сочетая в конструкции преимущества двух методов линейной оптимизации кулачка, показанных на рисунках 2 и 3, кулачок используется для гибридной обработки, короткое фокусное расстояние и среднее фокусное расстояние используются для обработки линейного изменения с переменным интервалом, а длинное фокусное расстояние используется для обработки линейных изменений с переменным интервалом. фокусное расстояние используется для обработки линейного изменения фокусного расстояния.
После попытки получился гибридный кулачок, как показано на рисунке 4. Полный угол подъема пассивного кулачка составляет менее 38°, а локальный максимальный угол подъема боевого кулачка составляет 39°. Углы подъема двух кулачков хорошо совпадают, движение кулачков плавное, а крутящий момент сбалансирован, поэтому применяется этот метод оптимизации.
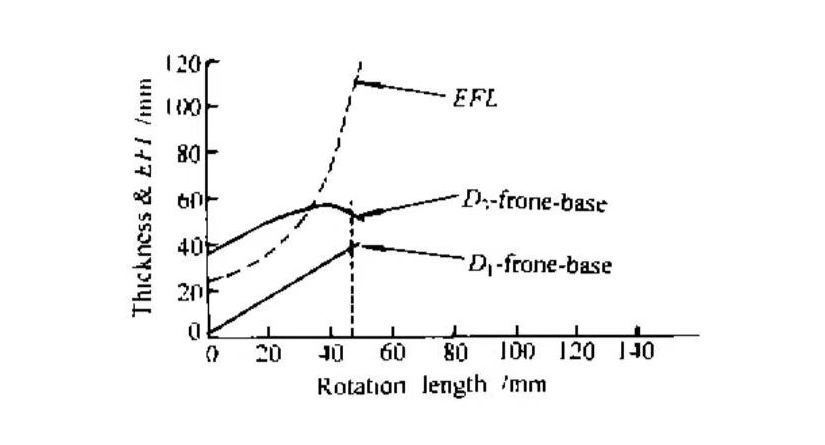
Рисунок 4. Кулачок, оптимизированный для смешивания
В процессе оптимизации трех вышеупомянутых типов кулачков две кривые кулачков основаны на определенной общей поверхности, и их рисование автоматически реализуется путем запуска самодельной макропрограммы Macro-PLUS через дополнительную функцию UGR CODEV.
Длина вращения определяется ожидаемым диаметром и ожидаемым углом поворота кулачка. Поскольку осевая длина группы масштабирования и группы компенсации системы очень мала, механическая конструкция группы масштабирования и группы компенсации имеет относительно большой диаметр.
Чтобы обеспечить плавность движения зума, кулачок использует метод «двойного привода диаметра» для управления движением группы зума и группы компенсации. Поэтому, после рассмотрения прочности механических компонентов кулачка, прогнозируемый угол поворота кулачка принимается равным 160°.
Результат работы гибридного оптимизированного кулачка на рис. 4 был практически применен в двух разработанных наборах зум-объективов. Такие испытания, как оптический осмотр, вибрация, высокая и низкая температура, а также фактическое использование, показывают, что оптическая конструкция и оптимизация кулачка зум-объектива успешны.
Тестовый запуск макропрограммы Macro-PLUS, составленной мной для различных точек данных кулачков и различных двухкомпонентных оптических схем, показывает, что процедура и метод управления программы полностью подходят для проектирования оптимизации кулачков других двухкомпонентных механически компенсированных кулачков. зум-объективы.
Объектив Quanhom с непрерывным оптическим зумом и LWIR с балансом апертуры, легкостью и ценой, идеально подходит для наблюдения и обеспечения безопасности на больших расстояниях, поддерживает формат SXGA (1280x1024 12 мкм). Как эксперт, много лет изучавший инфракрасные зум-объективы, Куанхом может дать вам в определенной степени профессиональный совет.
Quanhom — производитель опто-электромеханических компонентов с многолетним опытом. Благодаря нашим превосходным технологиям исследований и разработок и строгому подходу к производству мы стали лидером в этой отрасли. Мы оснащены профессиональной системой контроля качества и комплексной управленческой командой, которая контролирует все аспекты от производства продукции до экспорта. В то же время мы также предоставим пользователям продуманное комплексное обслуживание и эффективные решения. Если вы заинтересованы в нашем инфракрасном зум-объективе, немедленно свяжитесь с нами!
Авторы: Цзюньхэ Мэн, Чжэнь Чжан, Синвэнь Сунь (Тяньцзиньский институт технической физики, Тяньцзинь 300192)
Источник журнала: Vol. 31 № 1, Инфракрасная и лазерная техника, февраль 2002 г.
Дата получения: 23 мая 2001 г. Дата пересмотра: 12 октября 2001 г.
Об авторе: Цзюньхэ Мэн (1963-), мужчина, уроженец Тяньцзиня, исследователь, преподаватель магистратуры, в основном занимается исследованиями в области оптического дизайна и опубликовал более 10 статей.
Использованная литература:
[1] Справочное руководство КОД V компании Optical Research Associates[M]. Калифорния: ORA, 1999, 29 сентября ~ 34 сентября.
[2] 王之江,光学技术手册(上册)[M],北京:机械工业出版社,l987.1119-1166.
[3] 袁旭沧, 光学设计[M],北京:北京理工大学出版社.1988.276-280.
[4] 张以谟,应用光学(下册)[M],北京:机械工业出版社.1982.148-168.
[5] 李士贤, 李林, 光学设计手册[M], 北京理工大学版杜, 1996.
[6] 电影镜头设计组,电影摄影物镜光学设计[M],北京中国工业出版社.1971.167-259.
[7] 常群, 光学设计文集[M], 北京:科学出版社, 1976.16-76.
[8] 陶纯堪,变焦距光学系统设计[M],北京:国防工业出版社, 1989.
[9] 帕霍莫夫;白淑惠 变焦距系统[M],北京:国防工业出版社, 1980.
[10] 林大键, 工程光学系统设计[M], 北京: 机械工业出版社, 1987.
[11] 王子余,几何光学和光学设计[M],浙江:浙江大学出版社, 1989.