Метод быстрого измерения фокусного расстояния на основе изображений инфракрасных линз
- доля
- Время выпуска
- 2021/12/24
Резюме
В этой статье конкретно рассказывается о методе быстрого определения фокусного расстояния инфракрасной линзы на основе изображений цели с острым краем, который позволяет быстро и точно измерять фокусное расстояние инфракрасной линзы в пакетном режиме.
Фокусное расстояние объектива относится к расстоянию от главной точки до фокуса оптики объектива и является важным показателем производительности объектива. Длина фокусного расстояния объектива определяет размер получаемого изображения, размер поля зрения, размер глубины резкости и перспективу изображения. Поэтому вопрос о том, как точно определить фокусное расстояние инфракрасной линзы, является важным содержанием исследования определения параметров инфракрасной линзы.
Метод измерения фокусного расстояния инфракрасной линзы можно разделить на прямой и косвенный. Косвенный метод заключается в обратном определении фокусного расстояния линзы путем измерения угла зрения линзы. Однако предпосылка косвенного метода состоит в том, что искажения линзы отсутствуют.
При реальном измерении, особенно для объективов с малым фокусным расстоянием, искажения не являются незначительными, что приводит к неточности расчета фокусного расстояния объектива косвенным методом; прямой метод состоит в том, чтобы получить информацию о целевом изображении, а затем получить фокусное расстояние объектива.
В настоящее время основным оборудованием является оборудование для измерения MTF объектива. Это оборудование имеет высокую точность измерений и хорошую согласованность, но оборудование дорогое, стоимость измерения фокусного расстояния объектива высока, а эффективность низкая, что не способствует быстрому обнаружению партийных линз.
Ориентируясь на текущую ситуацию, в этой статье предлагается метод быстрого определения фокусного расстояния инфракрасной линзы на основе изображения цели с острием ножа. Этот метод собирает изображение цели с острой кромкой в сфокусированном состоянии инфракрасной линзы, использует метод пороговой сегментации Оцу для получения бинаризованного изображения и извлекает контур края цели, а затем использует аффинное преобразование для получения минимальный описанный прямоугольник, соответствующий цели с острием ножа, и описанный прямоугольник.
Координаты вершин вносятся в формулу расчета фокусного расстояния, а затем оценивается соответствующее фокусное расстояние инфракрасной линзы. Этот метод позволяет реализовать быстрое и точное пакетное измерение фокусного расстояния инфракрасной линзы и эффективно снизить стоимость измерения параметров линзы.
1. Теория и метод
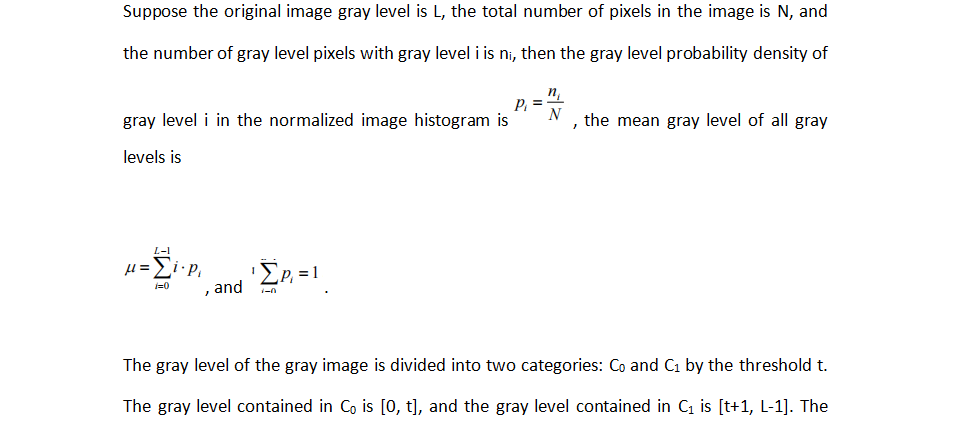
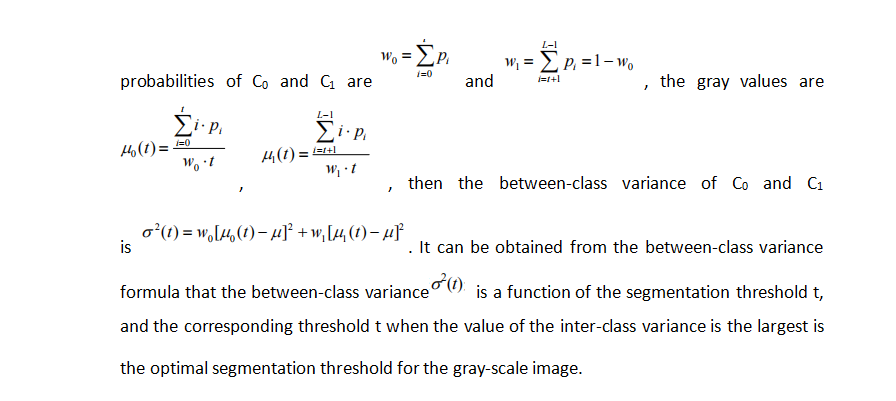
1.1 Адаптивная пороговая сегментация
Метод максимальной межклассовой дисперсии (Оцу) представляет собой общий алгоритм обнаружения и сегментации. Ввиду ситуации, когда двойные пики гистограммы серого изображения не имеют очевидных впадин или двойные пики и впадины неочевидны, метод максимальной дисперсии между классами подходит для определения положения порога сегментации между двойными пиками.
Этот метод использует совокупные моменты нулевого и первого порядка гистограммы серого изображения, чтобы максимизировать дискриминантную функцию и выбрать лучший порог для сегментации изображения.
1.2 Извлечение краев
Извлечение краев — это распространенный метод сегментации изображений на основе мутаций серого пикселей. Обычно используемые методы выделения ребер включают метод выделения ребер на основе морфологического градиента, метод выделения ребер Собеля, метод выделения ребер Лапласа и метод выделения ребер Кэнни.
Метод выделения краев, основанный на морфологическом градиенте, заключается в вычитании результата морфологического расширения из результата морфологической коррозии на изображении для получения информации о контуре края, содержащей целевой градиент. Эта операция изменит размер пикселя цели после изображения и повлияет на точность вычислений.
Метод выделения ребер Собеля и метод выделения ребер Лапласа имеют низкую точность выделения ребер, когда ядро свертки мало. Для более крупных ядер свертки в процессе аппроксимации используется больше пикселей, поэтому потеря времени велика.
В этой статье выбран метод извлечения ребер Canny. Этот метод сначала вычисляет производные первого порядка в направлениях x и y, а затем объединяет их в 4 производные по направлению и объединяет точки локального максимума в производных по направлению для формирования пикселей-кандидатов на края.
Наконец, при извлечении контура края метод Канни использует два порога. Если градиент пикселей превышает большее пороговое значение, он помечается как допустимый край; если градиент пикселя меньше меньшего порога, он помечается как неэффективный край; если градиент пикселя находится между этими двумя, только когда он соединен с пикселем с высоким порогом, он помечается как действительный край.
1.3 Аффинное преобразование
Аффинное преобразование является важным методом обработки при геометрическом преобразовании изображений. Он отображает любой параллелограмм ABCD на плоскости в любой другой параллелограмм ABCD и сохраняет прямолинейность и параллельность отрезков прямой до и после преобразования.
Посредством аффинного преобразования могут быть реализованы геометрические преобразования, такие как перемещение, вращение, расширение и обращение изображения. Аффинное преобразование в двумерном евклидовом пространстве можно выразить формулой (1). Согласно формуле (1) типичное аффинное преобразование в основном имеет следующие виды:
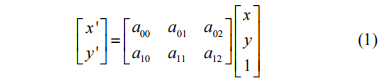
(1) Трансляционное преобразование. Переместите точку (x, y) в точку (x + a, y + b), тогда матрица изменения будет:

(2) Масштабирование и трансформация. Если горизонтальную координату точки (x, y) увеличить или уменьшить в раз, а ординату увеличить или уменьшить в b раз, матрица преобразования будет иметь вид:
(3) Преобразование вращения. Поверните целевое изображение против часовой стрелки в радианах вокруг начала координат, тогда матрица преобразования будет следующей:

1.4 Вывод формулы расчета фокусного расстояния
Принципиальная схема прохождения прямоугольной мишени через систему оптической визуализации представлена на рисунке 1.

Рис.1 Принципиальная схема изображения цели оптической системой
Где x_target — физическая ширина прямоугольной цели, а y_target — физическая высота прямоугольной цели, оба в мм. Размер выходного изображения прямоугольной цели после отображения оптической системой составляет m×n, а размер пикселя цели в изображении равен qp и sr, и все единицы измерения представляют собой пиксели. Используя треугольное соотношение системы оптического изображения, можно получить следующее соотношение:

Где: ppH – горизонтальный размер детектора, мкм; жстолбец– фокусное расстояние коллиматорной трубки, мм; жЛен– фокусное расстояние инфракрасной линзы, мм. Связь между мгновенным горизонтальным полем зрения детектора и фокусным расстоянием объектива следующая:

Следовательно, фокусное расстояние инфракрасной линзы:

Среди них, подставив уравнение (2) в уравнение (3), можно получить мгновенный горизонтальный угол поля зрения детектора:

2. Результаты экспериментов и анализ.
Мишенью, выбранной в данной статье, является остроконечная мишень радиусом 16 мм, фокусным расстоянием коллиматора 260 мм, неохлаждаемым детектором с разрешением 640×512, расстоянием между пикселями 17 мкм и теоретическим фокусным расстоянием Инфракрасная линза 54 мм.
Рисунок 2 (a) представляет собой выходное изображение цели с острой кромкой через систему оптической визуализации, когда инфракрасная линза находится в сфокусированном состоянии, Рисунок 2 (b) представляет собой результат извлечения края цели после бинаризации изображения, и Рисунок 2(c) представляет собой целевое моделирование. Выходной результат после рентгенографического преобразования. Из рисунка 2(b) видно, что этот метод позволяет точно извлечь контур края мишени с острой кромкой.
Подведя координаты вершин описанного прямоугольника острой мишени на рисунке 2(в) в расчетные формулы (4) и (5), фактическое фокусное расстояние инфракрасной линзы 54 мм можно получить как 56,1406 мм. , а фокусное расстояние объектива было проверено органом по сертификации. Оно составляет 55,7360 мм, абсолютная погрешность 0,4046 мм, процент ошибки 0,7.
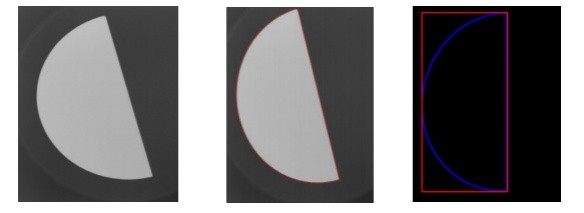
(а) Исходное изображение (б) Изображение после выделения краев (в) Изображение после преобразования излучения
Рис.2. Схема обработки изображения ножевой цели.
Чтобы проверить универсальность алгоритма в этой статье, фокусные расстояния 5 инфракрасных линз 54 мм и 8 мм в одной партии были рассчитаны соответственно и сравнены с результатами испытаний органа по сертификации, как показано в Таблице 1. и таблица 2. С учетом формул (4) и (5) к параметрам, влияющим на точность измерения фокусного расстояния инфракрасной линзы, относятся горизонтальный размер пикселя детектора, фокусное расстояние коллиматора, физический размер прямоугольной мишени и горизонтальные пиксели, занятые целью на изображении.
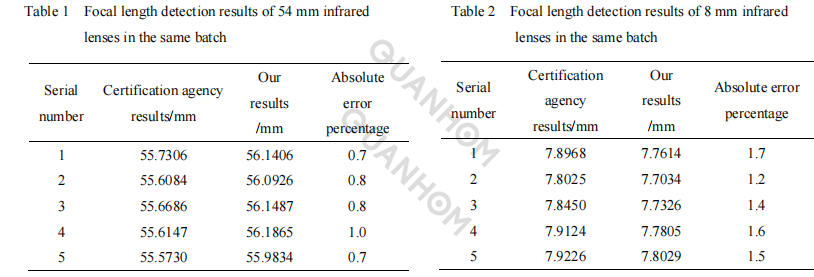
Среди них горизонтальный размер пикселя детектора, фокусное расстояние коллиматора и физический размер прямоугольной цели зависят от точности обработки обработанных деталей, и существуют определенные ошибки, поэтому вся платформа обнаружения должна быть быть откалиброван. Точность расчета значения горизонтальных пикселей, занимаемых объектом на изображении, связана с фокусным расстоянием измерительной линзы.
Инфракрасный объектив с большим фокусным расстоянием имеет высокое разрешение изображения, и оцененная погрешность мало влияет на результат, тогда как инфракрасный объектив с малым фокусным расстоянием Разрешение изображения, формируемого объективом, низкое, а ошибка оценка оказывает большое влияние на результат.
Следовательно, при вычислении горизонтальных пикселей, занятых целью на изображении, необходимо выполнить субпиксельную обработку изображения, чтобы уменьшить ошибку оценки, повысить точность оценки значения и тем самым повысить точность измерения фокусного расстояния. Каким образом повысить точность измерения фокусного расстояния инфракрасной линзы, станет следующим шагом исследовательской группы.
3. Заключение
В этой статье представлен метод быстрого определения фокусного расстояния инфракрасной линзы на основе изображений. Результат сравнения показывает, что средний процент абсолютной ошибки фокусного расстояния объектива, оцененного этим методом, составляет менее 1,48 по сравнению с результатом определения фокусного расстояния органа по сертификации. Подтверждены валидность и точность метода и заложены основы быстрого определения важных параметров хрусталика.
Quanhom продолжает исследовать и разрабатывать новые технологии обнаружения, а также точно оценивать и улучшать характеристики инфракрасных оптических линз. Мы можем не только предоставлять пользователям высококачественную продукцию, но и разрабатывать продуманные решения, основанные на реальных потребностях пользователей.
Как опытный производительОптико-электромеханические компонентыКомпания Quanhom стремится предоставить пользователям разнообразные тепловизионные инфракрасные камеры (LWIR, MWIR и SWIR) превосходного качества. Мы имеем хорошую репутацию в отрасли благодаря передовым технологиям исследований и разработок и превосходным технологиям производства. Наша продукция продается по всему миру и получила похвалу и доверие многих клиентов. Если вы хотите узнать больше о наших сопутствующих услугах, вы можете отправить нам свои потребности, и мы дадим вам удовлетворительный ответ как можно скорее.
Авторы: Чжун Цзяньбо, Ли Маочжун, Ся Цинсун, Ло Юнфан, Цзя Ючао, Ван Цайпин, Ли Хунбин, Ло Хун, Хуан Пань
Источник журнала: Инфракрасные технологии, Инфракрасные технологии, июнь 2021 г.
Дата получения: 30 апреля 2019 г.; Дата пересмотра: 10 июня 2021 г.
Использованная литература:
[1] 许士文.红外成像系统测试与评价[M]. Источник: 红外与激光工程, 2008: 150–180.
[2] Оцу Н. Метод выбора порога из гистограмм уровня серого [J].IEEE Transactions on Systems Man & Cybernetics, 1979, 9(1): 62-66.
[3] Имоча Сингх, Теджмани Синам. Локальный контраст и метод определения порога на основе среднего значения при бинаризации изображений [J]. Международный журнал компьютерных приложений, 2012, 51(6): 5-10.
[4] 赵文涛, 曹昕鸷, 田志勇.基于自适应阈值区域生长的红外舰船目标分割方法[J].红外技术, 2018, 40(2): 158–163. Чжао Вэньтао, ЦАО Синьчжи, Тянь Чжиюн. Метод сегментации целей инфракрасного корабля, основанный на адаптивном росте пороговой области[J]. Инфракрасные технологии, 2018, 40(2): 158-163.
[5] 郝争辉, 张学松, 王高, 等.基于边缘轮廓线提取的自动对焦评价函数[J].红外技术, 2018, 40(2): 170-175. ХАО Чжэнхуэй, ЧЖАН Сюэсун, ВАН Гао и др. Функция оценки автофокусировки, основанная на выделении контура края[J]. Инфракрасные технологии, 2018, 40(2): 170-175.
[6] Габор Домокос, Жолт Ланги, Марк Мезей. Модель эволюции формы при аффинных преобразованиях[J/OL][2017-09-18]. arXiv:1604.07630 (https://arxiv.org/abs/1604.07630v2).