Проектирование длинноволновой инфракрасной оптической системы с двойным рычажным зумом и непрерывным масштабированием
- доля
- Время выпуска
- 2022/1/20
Резюме
В этой статье на основе широко применявшегося длинноволнового охлаждаемого инфракрасного детектора 640×512 спроектирована оптическая система с непрерывным масштабированием и длинноволновым инфракрасным диапазоном с двойной связью.

Инфракрасные тепловизионные системы являются пассивными системами обнаружения и не требуют активного вспомогательного освещения. Поэтому они широко используются в навигации ночного видения, предупреждении о приближении, разведке целей и других областях. Для целей с высокотемпературными источниками излучения, например самолетов, внешнее тепловое излучение концентрируется в средневолновом инфракрасном диапазоне.
Средневолновая инфракрасная тепловизионная система обладает преимуществами в обнаружении и идентификации объектов; благодаря низкой температуре поверхности таких структур, как здания, их тепловое излучение концентрируется в длинноволновом инфракрасном диапазоне, а длинноволновая инфракрасная система способна подавлять неблагоприятное воздействие бликов от водной поверхности на качество изображения.
Таким образом, длинноволновая инфракрасная система имеет больше преимуществ при обнаружении целей в неблагоприятных погодных условиях, таких как плохая видимость и туман, а также при обнаружении и идентификации целей надводных кораблей.
Из-за эффектов дифракции диаметр диска Эйри оптической системы пропорционален длине волны и F-числу. Для длинноволновой инфракрасной тепловизионной системы с целью повышения ее разрешающей способности необходимо проектировать оптическую систему с большим относительным отверстием. Поэтому большое значение имеет исследование оптических систем с малыми F-числами и большими относительными апертурами.
Инфракрасная система непрерывного масштабирования реализуется за счет осевого перемещения группы масштабирования и группы компенсации. В соответствии с различными методами компенсации она делится на две формы: оптическую компенсацию и механическую компенсацию.
В системе масштабирования с оптической компенсацией, поскольку подвижная группа одновременно отвечает за функции масштабирования и компенсации, трудно достичь большого коэффициента масштабирования; для системы масштабирования с механической компенсацией интервал изменения между группой масштабирования, группой компенсации и фиксированной группой невелик. В системе нелегко добиться большой относительной апертуры и миниатюрного дизайна.
В этой статье на основе широко применявшегося длинноволнового охлаждаемого инфракрасного детектора 640×512 спроектирована оптическая система с непрерывным масштабированием и длинноволновым инфракрасным диапазоном с двойной связью. Группа масштабирования системы использует две фиксированные группы линз для выполнения линейного или нелинейного движения для достижения изменения фокусного расстояния, а группа компенсации выполняет нелинейное движение для компенсации расфокусировки плоскости изображения системы, вызванной движением группы масштабирования. . Убедитесь, что изображение всегда четкое во время процесса масштабирования.
Без увеличения сложности перемещения системы управления компонентами угол давления кулачковой кривой системы масштабирования можно уменьшить, количество линз системы можно уменьшить, а коэффициент масштабирования системы можно улучшить, реализуя при этом большую относительную величину. Апертура и миниатюризация.
1. Принцип масштабирования двухгрупповой связи и расчет исходной структуры.
На рисунке 1 показана оптическая принципиальная схема системы масштабирования с двойной связью. На рисунке 1 — передняя фиксированная группа; 2 и 4 — группы масштабирования, которые фиксированы вместе для выполнения линейного (или нелинейного) движения в одном направлении; 3 - группа компенсации, расположенная между двумя группами масштабирования, выполняет нелинейное движение для компенсации расфокусировки плоскости изображения системы, вызванной движением группы масштабирования, чтобы гарантировать, что плоскость изображения системы остается стабильной во время процесс масштабирования; 5 — задняя фиксированная группа.
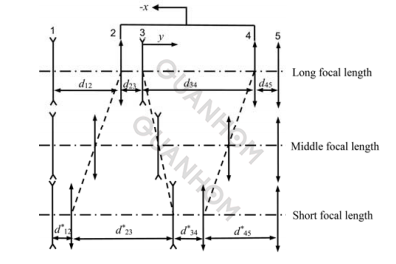
Рис.1 Схематическая схема двухрычажной системы масштабирования
Коэффициент масштабирования системы составляет:

В формуле: β2, β3, β4 — начальное увеличение 2-й, 3-й и 4-й составляющих соответственно, β*2, β*3, β*4 — 2-я, 3-я и 4-я составляющие после увеличения движения трансфокатора. . Начальные увеличения группы масштабирования и группы компенсации составляют:
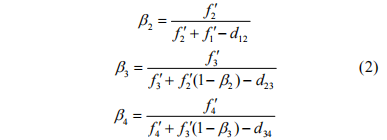
В формуле: f1, f2, f3, f4 — фокусные расстояния 1-го, 2-го, 3-го и 4-го компонентов соответственно, d12 — начальный интервал между 1-м и 2-м компонентами, d23 — расстояние между 2-м и 3-м компонентами. . Начальный интервал между d34 – это начальный интервал между 3-м и 4-м компонентами.
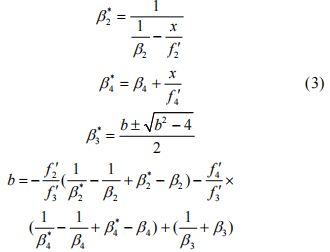
Увеличения группы масштабирования и группы компенсации составляют:
Величина перемещения зум-группы:

Величина перемещения компенсационной группы:

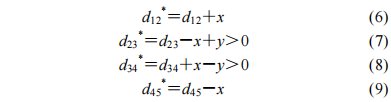
Интервал между компонентами составляет:
Сначала задайте нормированные начальные значения: f3, d23, d34, примите β3=-1, β2, β4=1 или β2=-1, β3=1, β4=1 для расчета исходной структуры системы.
2. Показатели проектирования и результаты проектирования
2.1 Проектные показатели
Детектор: холодильный 640×512;
Размер пикселя: 15 мкм;
Рабочая полоса: 7,7~9,5 мкм;
F-число: 2,24;
Фокусное расстояние: 30–360 мм;
Диаметр системы: ≤180 мм;
Общая длина системы: ≤320 мм.
2.2 Результаты проектирования и анализ качества изображения
В качестве исходного положения установите телевик, возьмите нормализованное значение: f3=1, d23 самое короткое у телевика, и этого достаточно, чтобы линзы не касались друг друга, возьмите 0,05, установите телевик d34=1,5 , примем β3 =-1, β2β4=1. Проведем расчет исходной структуры системы. Подставим в формулы (1)-(9), чтобы получить систему в состоянии короткого фокуса: d12*=0,2, d23*=1,5, d34*=0,02, d45*=0,9; в состоянии длинного фокуса: d12=0,9, d23=0,3, d34=1,5, d45=0,2 фокусное расстояние каждого компонента: f2=-0,35, f1=1,5, f4=-6.
После масштабирования полученной исходной структуры программное обеспечение оптического проектирования было использовано для настройки и оптимизации. Наконец, была разработана оптическая система с двойной связью, подходящая для длинноволнового охлаждаемого детектора 640×512, как показано на рис. 2.
F-число системы составляло 2,24, а рабочая полоса — длинноволновая 7,7–9,5 мкм, состоящая из 8 линз, максимальный диаметр — 166 мм. Третья линза изготовлена из материала ZnSe, а все остальные изготовлены из материала Ge, из которого задняя поверхность первой линзы и задняя поверхность третьей линзы являются асферическими. Принципиальная схема процесса масштабирования оптической системы непрерывного масштабирования показана на рисунке 3.
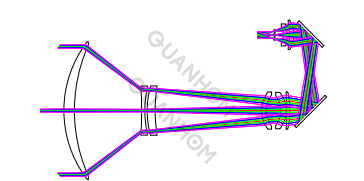
Рис.2 Структура оптической системы
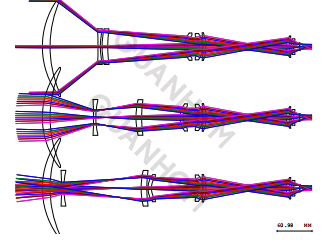
Рис.3 Схема процесса масштабирования оптической системы
На рисунках 4, 5 и 6 показаны кривые передаточной функции модуляции системы на коротких, средних и длинных фокусных расстояниях. Размер пикселя длинноволнового охлаждаемого инфракрасного детектора 640×512 составляет 15 мкм, соответствующая характеристическая частота составляет 33 пл/мм, передаточная функция оптической системы в поле зрения 0,7 близка к дифракционному пределу, а значение передаточной функции в краевом поле зрения больше 0,15, что соответствует требованиям приложения.
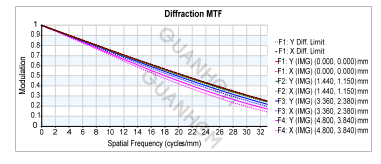
Рис.4 Кривые MTF короткого фокусного расстояния

Рис.5 Кривые MTF среднего фокусного расстояния
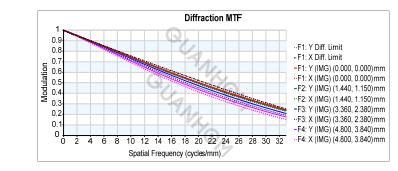
Рис.6 Кривые MTF длиннофокусного расстояния
На рисунках 7, 8 и 9 представлены точечные диаграммы системы на коротком, среднем и длинном фокусных расстояниях. Из рисунков видно, что диаметр дисперсионного пятна системы на разных фокусных расстояниях меньше теоретического диаметра диска Эйри системы, чтобы соответствовать требованиям применения.
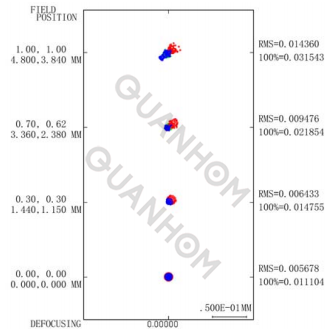
Рис.7 Диаграмма пятна короткофокусного расстояния
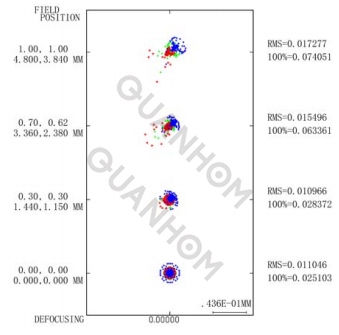
Рис.8 Диаграмма пятна среднего фокусного расстояния

Рис.9 Диаграмма пятна длиннофокусного расстояния
На рисунках 10, 11 и 12 показаны кривые кривизны поля и искажения системы на коротких, средних и длинных фокусных расстояниях. Из рисунков видно, что искажения системы на разных фокусных расстояниях составляют менее 2,5%, что соответствует требованиям применения.
На рисунке 13 представлена диаграмма кривой масштабирования оптической системы с непрерывным масштабированием, по оси абсцисс — фокусное расстояние оптической системы с непрерывным масштабированием, а по оси ординат — осевое расстояние группы масштабирования и группы компенсации относительно передней фиксированной группы. На рисунке видно, что кривая масштабирования системы плавная и непрерывная, без резких изменений, что позволяет эффективно избежать зависания системы в процессе масштабирования.
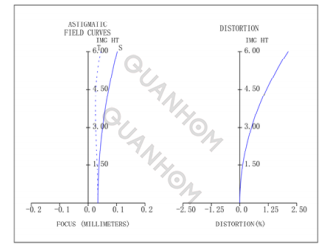
Рис.10 Астигматические кривые поля и искажения короткого фокусного расстояния
Поскольку группа масштабирования состоит из двух групп линз, которые разделяют оптическую силу группы масштабирования, угол давления кулачковой кривой группы масштабирования можно уменьшить. Перед моделированием конструкции кулачка необходимо оптимизировать кривую кулачка.
При оптимизации кривой кулачка необходимо обеспечить равномерность и стабильность процесса масштабирования. При этом для удобства обработки угол давления кривой кулачка не может быть слишком большим, а максимальный не может превышать 45°.
На фиг. 14 представлен график угла давления кулачка трансфокатора оптической системы непрерывного масштабирования. Система принимает нелинейное движение как группы масштабирования, так и группы компенсации. После оптимизации максимальный угол давления кривой масштабирования составляет 41,31 °, максимальный угол давления компенсационной кривой — 34,29 °, а угол окружности кулачка — 172,45 °.
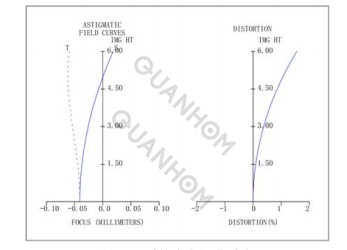
Рис.11 Астигматические кривые поля и искажение среднего фокусного расстояния
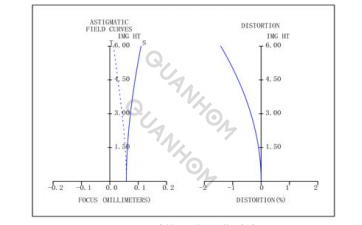
Рис.12 Астигматические кривые поля и искажения длиннофокусного расстояния
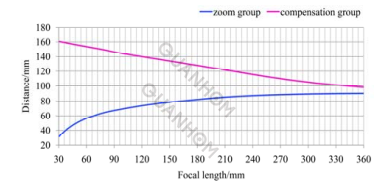
Рис.13 Кривые масштабирования оптической системы с непрерывным масштабированием
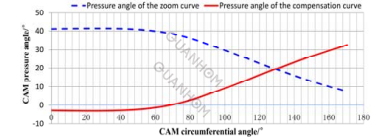
Рис.14 Угол давления кулачка трансфокатора оптической системы непрерывного масштабирования
3. Заключение
В данной работе изучается конструкция инфракрасной оптической системы с двойной связью. На основе длинноволнового охлаждаемого инфракрасного детектора размером 640×512, 15 мкм разработана длинноволновая инфракрасная оптическая система с непрерывным масштабированием и двойной связью с фокусным расстоянием от 30 мм до 360 мм и числом F 2,24.
Группа масштабирования системы состоит из двух групп фиксированных линз для выполнения линейного или нелинейного движения, а группа компенсации выполняет нелинейное движение для компенсации расфокусировки плоскости изображения системы, вызванной движением группы масштабирования, тем самым гарантируя, что в процессе масштабирования изображение всегда будет четким. Результаты показывают, что угол давления кривой кулачка может быть уменьшен, а конструкция большого относительного отверстия и миниатюризация могут быть достигнуты без увеличения сложности системы управления подвижным компонентом.
Мы являемся опытным производителемОптико-электромеханические компоненты, предназначенная для предоставления пользователям разнообразных высококачественных инфракрасных тепловизионных линз. Мы ставим потребности клиентов на первое место и всесторонне контролируем качество нашей продукции. По этой причине мы оснащены строгой системой контроля качества для контроля проектирования, производства и экспорта продукции. Если вы заинтересованы в наших инфракрасных тепловизионных линзах, немедленно свяжитесь с нами!
Авторы: У Хайцин, Чжао Синьлян, Ли Тунхай, Тянь Хайся, Цуй Ли
Источник журнала: Инфракрасные технологии Том 41 №7 июль 2019 г.
Дата получения: 18 декабря 2018 г.; Дата изменения: 26 июня 2019 г.
Использованная литература:
[1] ЛУО Шоуджун, СЯ Иньхуэй, Ян Ниннин и др. Длинноволновая инфракрасная оптическая система непрерывного сканирования с зумом[J]. Китайская оптика, 2015, 8(1): 107-113.
[2] Ли Жуйяо, Фу Юэган, Лю Чжиин. Проектирование атермализации компактной средневолновой инфракрасной системы визуализации [J]. Инфракрасные технологии, 2018, 40(2): 119-124.
[3] HE Wubin, HAO Junming, WU Wei и др. Разработка длинноволновой инфракрасной оптической системы с низким F/# и непрерывным масштабированием[J]. Лазер и инфракрасное излучение, 2013, 43(7): 757-760.
[4] ВАН Чжицзян. Практическое руководство по оптической технологии[М]. Пекин: China Machine Press, 2007: 429–430.