Проектирование инфракрасной двухпольной системы фокусировки на основе DSP
- доля
- Время выпуска
- 2022/4/12
Резюме
Инфракрасные двухпольные системы широко используются в средствах оптико-электронной разведки. В этой статье, в соответствии с рабочими характеристиками двухпольной инфракрасной оптической системы, разработан набор оптической системы фокусировки линз на основе DSP.
Двухпольная инфракрасная оптическая система может одновременно обеспечивать два изображения с разным увеличением и разными полями обзора. Большое поле в системе имеет низкое разрешение и используется для поиска целей в большом диапазоне; небольшое поле используется для идентификации, анализа и подтверждения конкретных целей. Поэтому инфракрасная система двойного поля зрения широко используется в бортовой, автомобильной и другой оптико-электронной разведке.
В данной работе в соответствии с рабочими характеристиками и техническими требованиями двухпольной инфракрасной оптической системы спроектирован набор оптических систем фокусировки линз на основе ЦОС. За счет применения конструктивной идеи оптико-механической интеграции функции быстрого переключения и фокусировки больших и малых полей зрения реализуются за счет параллельного перемещения группы оптических линз вдоль оси.
1 Конструкция системы фокусировки
1.1 Выбор метода фокусировки
Обычно система масштабирования с двойным полем зрения делится на две категории: инфракрасная линза с двойным полем зрения , группа оптических линз, перемещающаяся внутрь и наружу, с переключаемой системой масштабирования и двухпозиционная система масштабирования. Переключаемая система масштабирования требует вставки части объектива в правильное положение для изменения фокусного расстояния оптической системы, поэтому боковой размер велик. Двухпозиционная система изменяет фокусное расстояние системы путем изменения осевого расстояния группы линз, что позволяет эффективно уменьшить объем системы и одновременно реализовать функции переключения поля зрения и точной фокусировки. .
Учитывая требования к качеству и размеру всей системы, используется двухпозиционная система масштабирования, которая перемещает группу оптических линз параллельно вдоль оси. Двухпозиционная система масштабирования состоит из передней фиксированной группы, группы подвижных линз и задней фиксированной группы. Принцип ее работы показан на рисунке 1. Когда подвижная группа линз находится в положении 1, система находится в состоянии короткого фокусного расстояния (большое поле зрения), а когда подвижная группа линз находится в положении 2, система в состоянии большого фокусного расстояния (малого поля зрения).
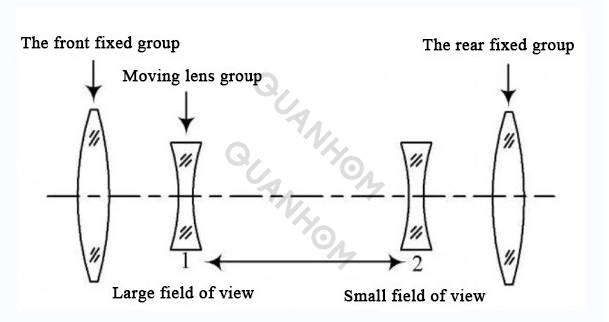
Рисунок 1 Принципиальная схема двухпольной инфракрасной оптики.
1.2 Конструкция системы фокусирующего движения
Вся система фокусировки состоит из системы управления с обратной связью, ядром которой является модуль управления DSP. Принципиальная схема системы показана на рисунке 2. В основном она состоит из следующих частей: модуль управления DSP, серводвигатель, ходовой винт, модуль скольжения, прецизионная линейная направляющая, линейка линейной решетки и т. д. Модуль DSP управляет вращением. двигателя после принятия команды управления от главного компьютера и изменяет вращательное движение двигателя на осевое линейное движение группы движущихся зеркал через механизм движения винтовой направляющей. Линейка линейной решетки определяет текущее положение скольжения группы линз и передает его обратно на DSP. Модуль управления DSP сравнивает текущее положение движущейся группы линз с заданным положением системы и дополнительно управляет двигателем, приводящим группу линз в движение в осевом направлении до тех пор, пока подвижная группа линз не достигнет заданного положения системы.
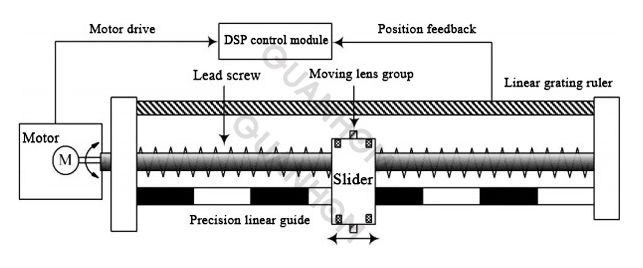
Рис. 2. Принципиальная схема фокусирующей системы.
2 Фокус на проектировании системного оборудования
Аппаратная схема системы фокусировки основана на контроллере DSP. TMS320LF 2407A представляет собой 16-битный цифровой сигнальный процессор с фиксированной запятой. Он объединяет возможности высокоскоростной цифровой обработки сигналов и оптимизированные периферийные схемы, подходящие для управления двигателем, обеспечивая управление двигателем набором цифровых решений с высокой точностью и высокой производительностью одновременно. Конструкция периферийной схемы системы управления основана на TMS320LF 2407A, которая в основном состоит из следующих основных частей: схема интерфейса последовательной связи с главным компьютером, схема силового привода, схема определения положения и так далее. Структурная схема системы управления представлена на рисунке 3.

Рисунок 3. Структурная схема аппаратной системы управления DSP.
2.1 Схема последовательной связи SCI
Система может осуществлять связь между DSP и главным компьютером через модуль последовательной связи SCI, встроенный в микросхему TM S320LF 2407A. В схеме используется хост-компьютер с микросхемой драйвера MAX232, соответствующий стандарту RS232, для отправки команд управления в модуль управления DSP. Система DSP реагирует на команды управления, вычисляя заданное положение движущейся группы линз, управляя движением двигателя для завершения фокусировки системы и тем временем отправляя на главный компьютер обратную связь о текущем рабочем состоянии системы управления фокусировкой.
2.2 Схема определения положения
Ключом к точному контролю положения подвижной группы линз является обнаружение ее смещения. В качестве датчика положения с разрешением 2 мкм выбрана прецизионная решетчатая линейка RGH22 компании Renishaw в Великобритании. Выходной сигнал представляет собой два изменения частоты и ортогональный (то есть импульс с разностью фаз 90°). Считывающая головка имеет опорный ноль и двойные концевые выключатели. Опорный ноль обеспечивает повторяемую исходную точку отсчета или нулевую точку, а концевой выключатель может выдавать сигнал, когда осевое перемещение достигает предельных точек на обоих концах, чтобы остановить двигатель.
Каждый менеджер событий EV устройства TMS320LF 2407A содержит схему квадратурно-декодированных импульсов QEP, которая может кодировать и подсчитывать квадратурно-декодированные входные импульсы, генерируемые линейкой решеток. После того, как линейка решетки генерирует импульс кодирования квадратур и отправляет его в схему кодирования квадратур, схема QEP может определить направление движения движущейся группы линз, определяя последовательность двух последовательностей, а также текущее смещение и скорость движущегося зеркала. Группа может быть рассчитана по количеству импульсов и частоте импульсов. Поскольку выход решетки, линейки представляет собой цифровой сигнал уровня 5 В, а DSP может принимать только сигнал уровня 3,3 В, микросхема SN74LV C245 используется в качестве схемы интерфейса преобразования уровня между DSP и считывающей головкой решетки.
2.3 Схема привода двигателя
В системе фокусировки сигнала ШИМ, выдаваемого DSP после обработки собранной информации, недостаточно для непосредственного управления двигателем, и требуется микросхема драйвера для преобразования его в сигнал управления, который может управлять двигателем. Схема привода двигателя использует микросхему привода двигателя L298N компании SGS. Это чип двигателя с двойным H-мостом с постоянным напряжением и постоянным током, который может одновременно управлять двумя двигателями постоянного тока, а выходной ток может достигать 2 А. Чтобы уменьшить влияние схемы управления на систему управления, сигнал ШИМ, генерируемый DSP, оптоэлектронно изолирован оптопарой TLP521, а затем отправляется на микросхему управления L298, что делает сигнал управления системой стабильным и надежным. Дополнительно на практике для защиты двигателя в схему управления следует добавить две группы обратных диодов.
3 Экспериментальные результаты
Рабочая полоса двухпольной инфракрасной оптической системы составляет 3-5 мкм. Ширина поля зрения составляет 24°×18°, узкое поле зрения — 4°×3°. Короткое фокусное расстояние составляет 20 мм, а длинное фокусное расстояние — 145 мм. Расстояние переключения между большим и малым полями зрения составляет 125 мм, а требуемая точность позиционирования подвижной группы линз составляет менее 20 мкм. Благодаря экспериментальным испытаниям система фокусировки может переключаться между большим и малым полем зрения в течение 1 с, а точность фокусировки может достигать 5 мкм, что соответствует точности позиционирования, необходимой системе. На рис. 4 показаны изображения инфракрасной оптической системы в большом и малом полях зрения соответственно.

Рисунок 4. Изображения оптической системы с большим и малым полем зрения
4. Вывод
В этой статье представлена система управления фокусировкой двухпольной инфракрасной оптической линзы, которая использует осевое перемещение подвижной группы линз для реализации масштабирования. Для одновременной реализации функций переключения поля зрения и фокусировки необходим всего один комплект электромеханических устройств, что позволяет эффективно управлять осевыми размерами, делая его конструкцию более компактной. В системе управления используется высокопроизводительный чип TMS320LF 2407A в качестве блока управления системой, что делает конструкцию всей аппаратной схемы простой и надежной. Он соответствует требованиям системы инфракрасной оптической визуализации по быстрому переключению поля зрения и высокой точности фокусировки.
Quanhom — профессиональный поставщик индивидуальных инфракрасных линз и системных компонентов . Наша современная команда исследований и разработок превосходно справляется с разработкой и производством ваших концепций продуктов в области тепловизионной инфракрасной оптики. От простых узлов инфракрасных линз до сложных и надежных оптико-механических и электрооптических узлов. Если вам нужно, пожалуйста, свяжитесь с нами .
Рекомендации
[1] Жэнь Дэцин. Оптическая схема инфракрасной двухпольной линзы[J]. Инфракрасные технологии, 1998, 20(3):19-22.
[2] Чэнь Левцзи. Инфракрасная оптическая система с двойным полем зрения для неохлаждаемого тепловизора в фокальной плоскости[J]. Инфракрасные технологии, 2007, 29(11):645-647.
[3] Ян Юлун, Гуань Фулинь, Чжан Туцяо и др. Разработка модели и управление фокусирующим механизмом отображающего зеркала космического солнечного телескопа [J]. Машиностроение Китая, 2006, 8 (17): 313–316.
[4] Лю Хэпин, Ян Липин, Чжан Сюэфэн и др. Структурный принцип TM S320LF240x DSP
и приложение [M]. Пекин: Издательство Пекинского университета аэронавтики и астронавтики, 2002.
[5] Лю Цзинькунь. Расширенное моделирование Matlab ПИД-регулирования [M]. Пекин: Издательство электронной промышленности, 2004.
[6] Ху Цзинь, Чжун Синжун, Ван Цзяцзюнь. Исследование формирователя изображения ближнего инфракрасного диапазона на основе метода частотной области
[J].Современные электронные технологии, 2007, 30(22):125-126.
[7] Ли Юньхун, Ли Цзюньхуа, Ли Пей. Применение технологии инфракрасного тепловидения на электростанциях [J].
Современные электронные технологии, 2008, 31(6):181-183.