Принцип работы и состав инфракрасного датчика
- доля
- Издатели
- Mikasa Tang
- Время выпуска
- 2022/8/5
Резюме
Инфракрасный датчик является одним из основных функциональных узлов инфракрасной системы. Его основной задачей является обнаружение различных динамических и статических целей и передача сигналов обнаруженных целей в инфракрасный блок обработки информации и изображений для обработки. В этой статье кратко описывается принцип работы и состав инфракрасного датчика.
Принцип работы и состав инфракрасного датчика
1. Принцип работы инфракрасного датчика
После того как инфракрасное излучение цели и фона проходит через линзу объектива, оно отображается в фокальной плоскости компонента обнаружения. Компонент инфракрасного обнаружения преобразует инфракрасное излучение в электрические сигналы и схему предварительной обработки через инфракрасный сигнал. После того, как инфракрасный сигнал подвергается коррелированной двойной выборке (CDS), электронной фильтрации и аналогово-цифровому преобразованию, NUC, устранению дефектов и сортировке синтеза. Затем параллельный цифровой сигнал отправляется в блок обработки потенциальной цели через линию передачи на определенное расстояние для дальнейшей обработки.
2. Компоненты инфракрасного датчика
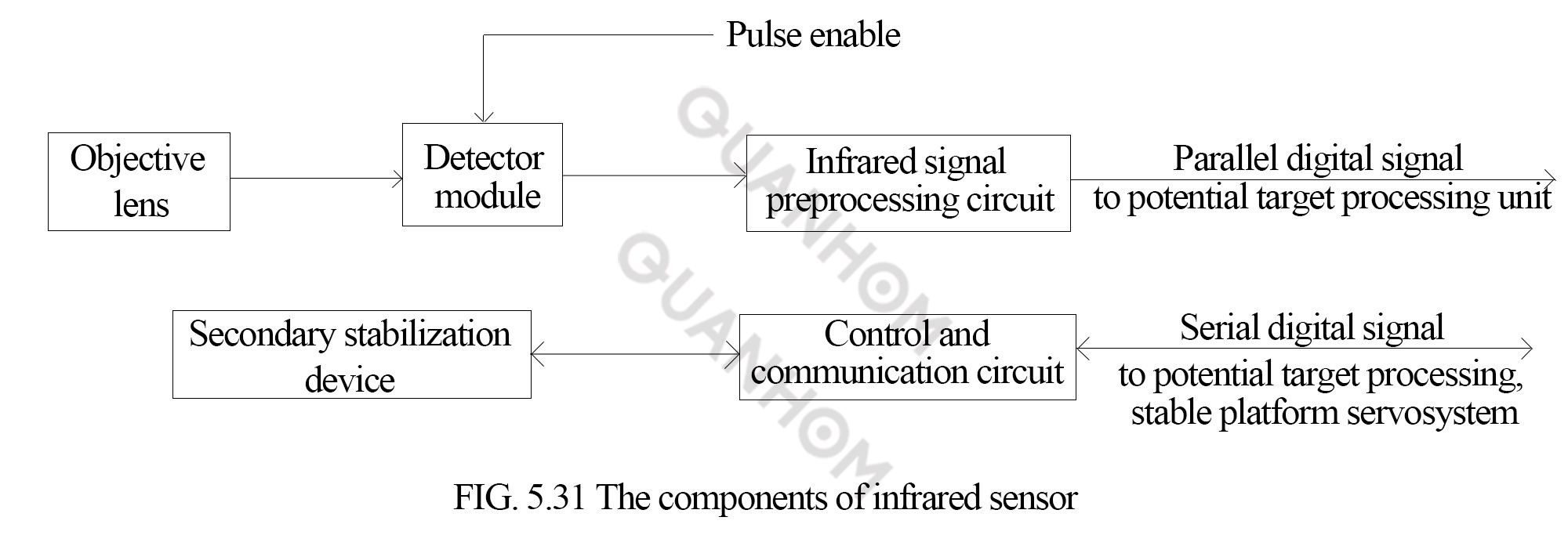
Инфракрасный датчик состоит из объектива (инфракрасной оптической системы), модуля инфракрасного детектора, схемы предварительной обработки инфракрасного сигнала, устройства вторичной стабилизации и схемы управления и связи. Это показано на фиг. 5.31.
2.1 Объектив
К объективу инфракрасного датчика предъявляются высокие требования к качеству изображения и оптической эффективности, а классическая оптическая конструкция не может гарантировать оптическую эффективность объектива. Следовательно, объектив должен быть спроектирован как асферическая пропускающая оптическая система. Конструкция выполнена из различных материалов для исправления хроматических аберраций в рабочей полосе.
2.2 Компоненты инфракрасного обнаружения
Компонент инфракрасного обнаружения состоит из следующих частей:
(1) Компонент ID TL005 288×4 LWIR IDDCA.
(2) Схема генератора тактовых импульсов детектора: генерирует импульсный сигнал, необходимый для обеспечения нормальной работы детектора.
(3) Схема смещения детектора: генерирует напряжение смещения, необходимое для нормальной работы детектора.
(4) Схема генератора включения импульсов, схема включения импульса схемы считывания ПЗС детектора, генерируемая системой измерения угла, поступление импульса, схема генератора тактовых импульсов предназначена для генерации требуемого импульсного сигнала ПЗС.
3. Схема предварительной обработки инфракрасного сигнала.
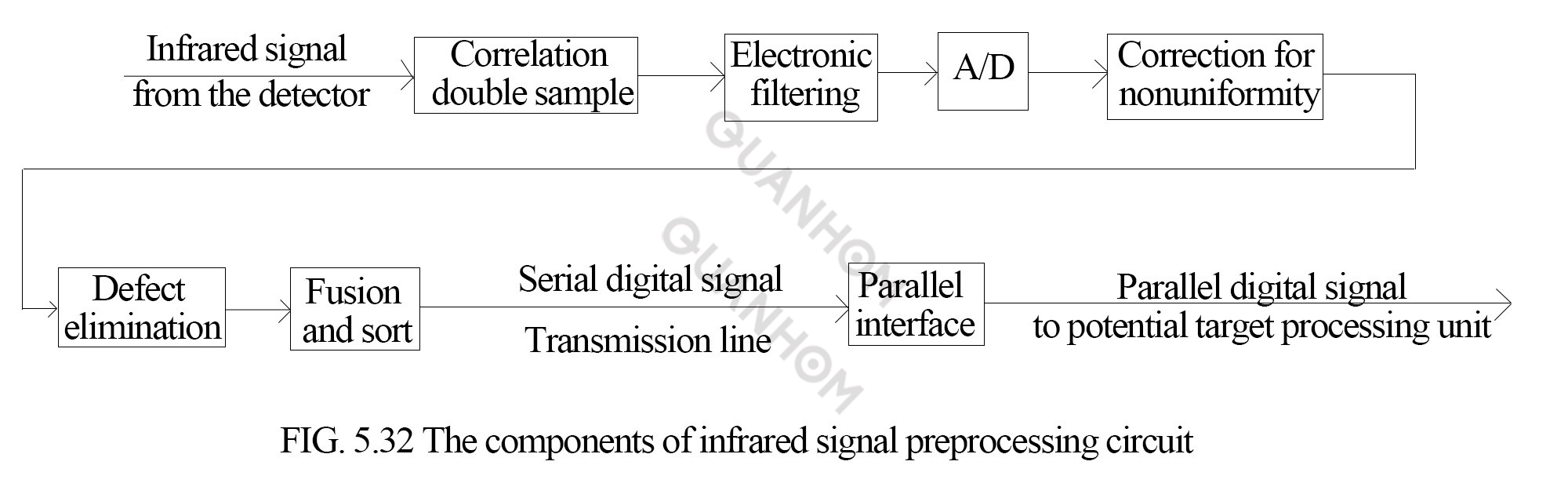
(1) CDS : применяется к выходному сигналу детектора для фильтрации шума переключения, генерируемого схемой считывания детектора.
(2) Электронная фильтрация: она может фильтровать низкочастотный шум, подавлять высокочастотный шум и улучшать соотношение сигнал/шум.
(3) Аналого-цифровое преобразование: его можно использовать для преобразования инфракрасных сигналов в аналоговые/цифровые величины, уровень квантования составляет 12 бит.
(4) NUC: он может корректировать выходной сигнал каждого из 288 каналов детектора. Обеспечить, чтобы под действием одинаковой энергии инфракрасного излучения неравномерность сигналов, генерируемых каждым каналом, составляла менее 0,5%. Для детекторов с линейным откликом достаточно выполнить двухточечную коррекцию чувствительности и точки смещения; для детекторов с нелинейным откликом для коррекции необходим алгоритм многоточечной кусочно-линейной аппроксимации. Поскольку определенный тип инфракрасной системы должен охватывать 360°, в систему невозможно включить эталон температуры. Благодаря исследованиям двухточечной и многоточечной кусочно-линейной аппроксимации и компенсации неравномерности на основе сцены условия работы являются благоприятными, затем разрабатывается общее оборудование, которое может выполнять эти три алгоритма.
(5) Устранение дефекта: оно заменяется средним сигналом двух недефектных каналов в окрестности дефекта для устранения дефекта.
(6) Слияние и сортировка: сигнал в предыдущем столбце задерживается, что эквивалентно времени между двумя соседними столбцами. После комплексной обработки двух столбцов формируется столбец сигналов для завершения слияния и сортировки.
(7) Параллельный интерфейс: он предназначен для параллельного вывода цифрового инфракрасного сигнала, сигнала синхронизации пикселей и сигнала синхронизации столбцов в блок обработки потенциальной цели и одновременного получения сигнала синхронизации столбцов от блока гониометра.
4. Цепи управления и связи.
Функции :
(1) Получают сигнал управления (включая сигнал управления коррекцией однородности, сигнал управления самопроверкой и сигнал управления усилением) от потенциального целевого блока обработки и отправляют сигнал результата самопроверки в потенциальный целевой блок обработки.
(2) Получите сигнал ориентации платформы от сервосистемы стабилизированной платформы.
(3) Управляйте устройством вторичной стабилизации.
(4) Управляйте схемой предварительной обработки инфракрасного сигнала.
5. Вторичное стабилизирующее устройство.
Устройство вторичной стабилизации состоит из зеркала, гироскопа, серводвигателя и схемы привода. Его функция – вторичная точная стабилизация инфракрасной оптической оси.